







Tangible Solutions out of Fairborn, Ohio recently contacted us wanting to see if a FlexArm could handle tapping their small parts. They make 3D-printed titanium medical implants and they were looking for an alternative to tapping on the CNC. They were tired of breaking taps and were ready to free up the machine for more complex, higher revenue parts.
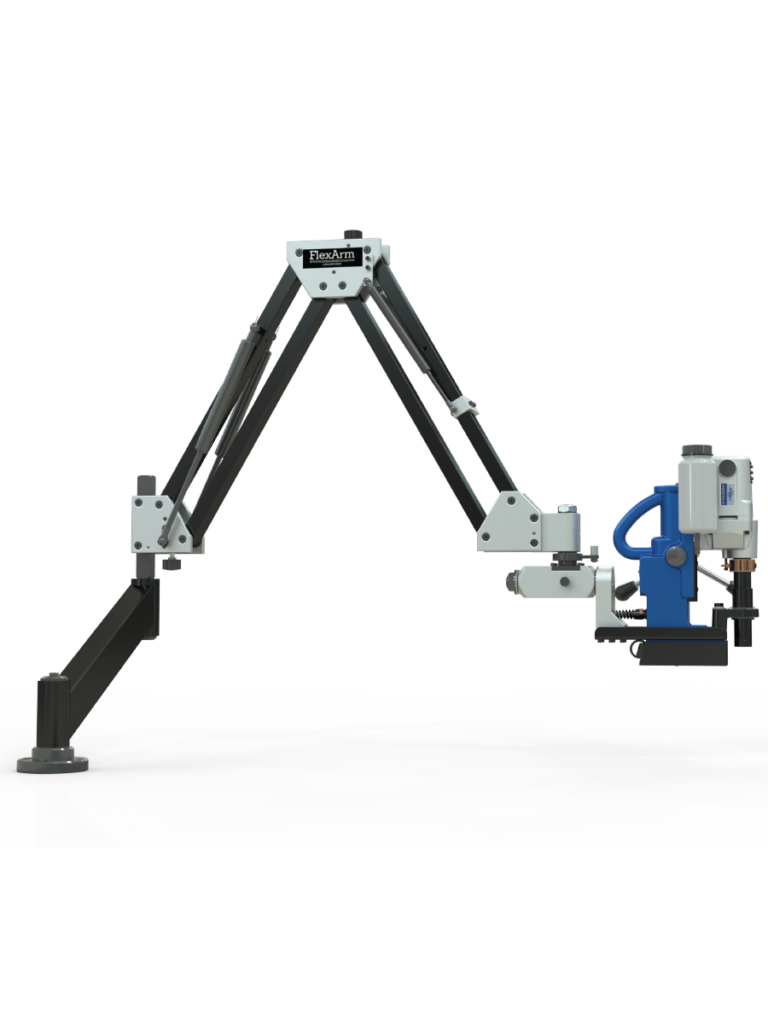
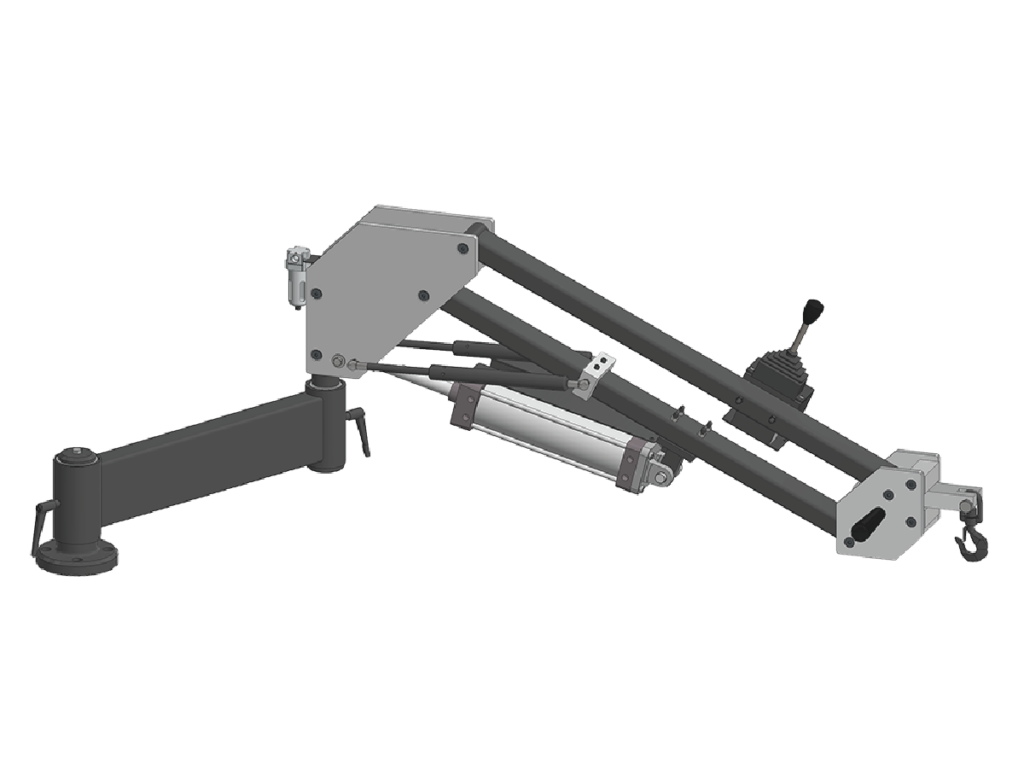
We invited them in-house so they could see how the FlexArm would perform. We tested multiple holes using M3 and M6 taps. The FlexArm was quickly able to tap through the material with ease. Both of these arms are capable of handling the small tap sizes, so they had the option to go with a hydraulic or pneumatic tapping arm.
Our Recommendations
- A-32 (pneumatic) – Tap Capacity up to 9/16”
- GH-18 (hydraulic) – Tap Capacity up to 5/8”
