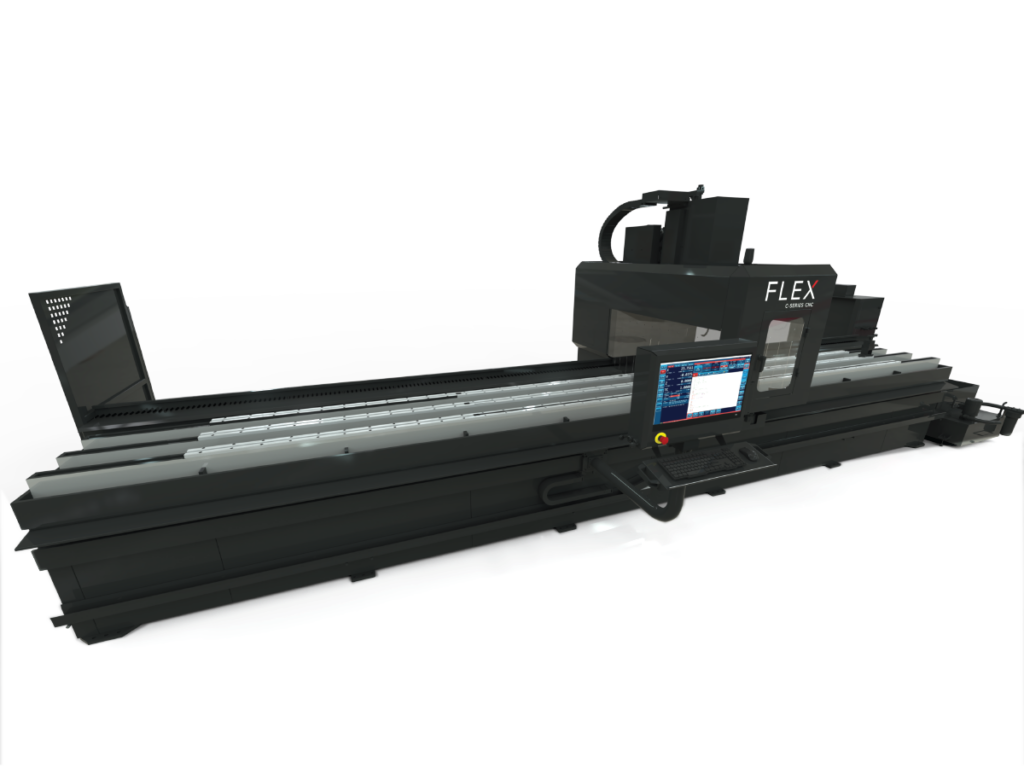








Tube lasers are powerful and efficient machines known for precise cutting of tubes and various long materials. However, their high price and specialization often make them impractical for shops with lower volumes or diverse processing needs. If you’re exploring affordable alternatives to tube lasers, the FlexCNC (long-bed vertical machining center) stands out as a versatile, cost-effective solution.
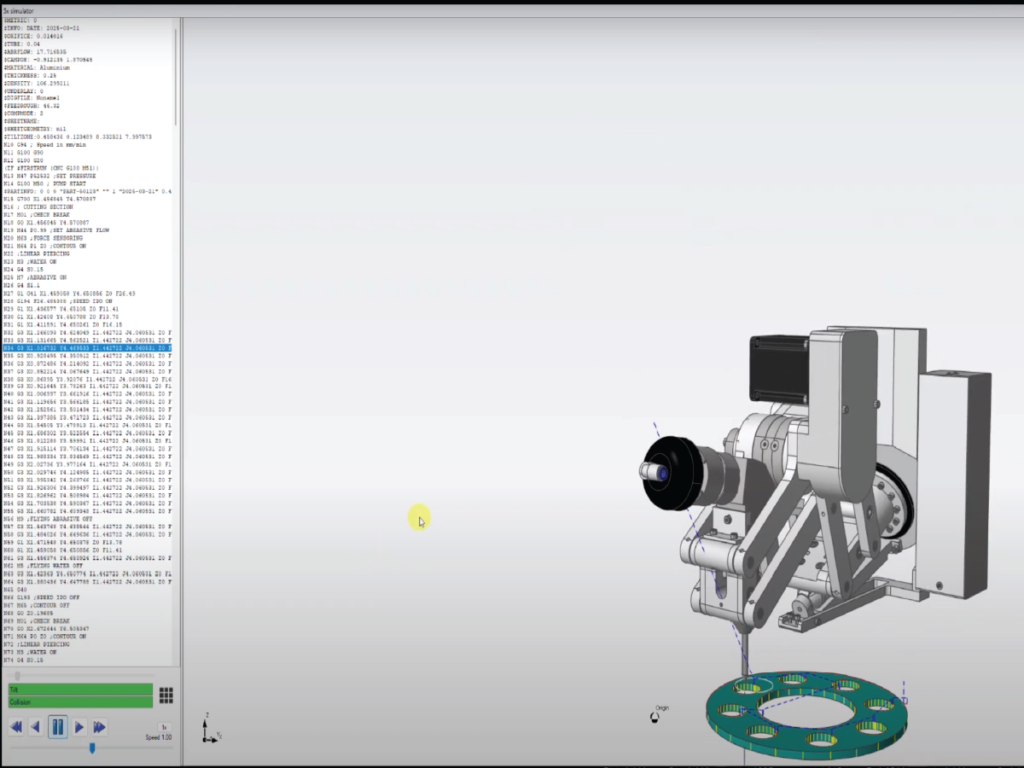
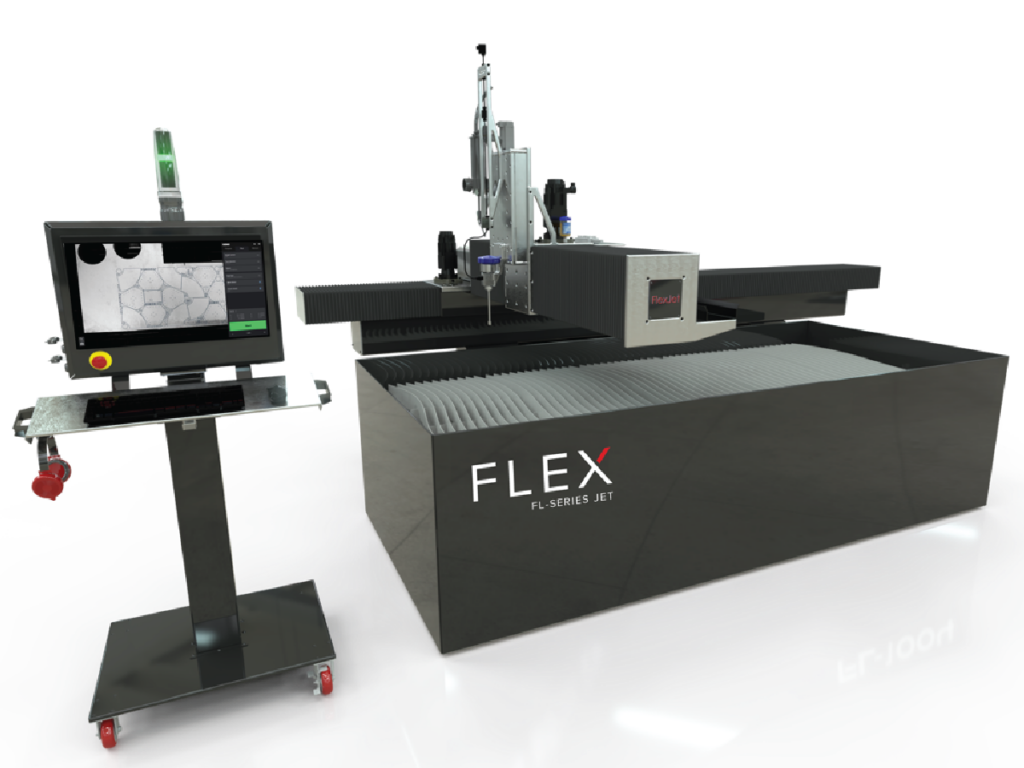
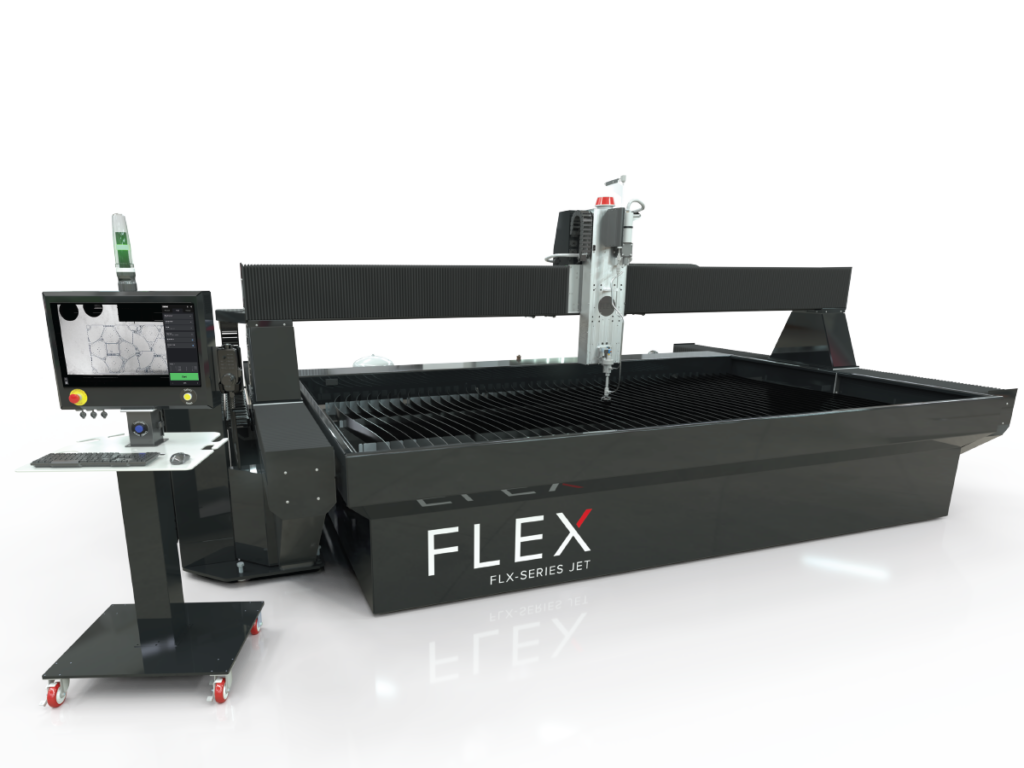
Jason covers the 2D basics of IGEMS software, walking you through the essential steps to program and export a CNC file for your FlexJet Waterjet.

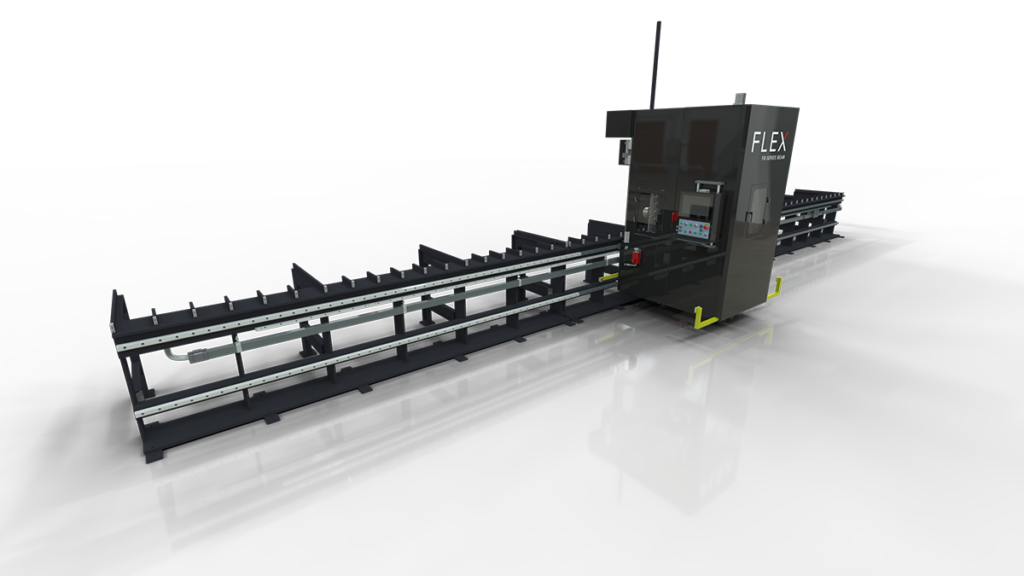
Beam drill lines accurately drill holes in a variety of steel profiles at different lengths with CNC controlled programming.
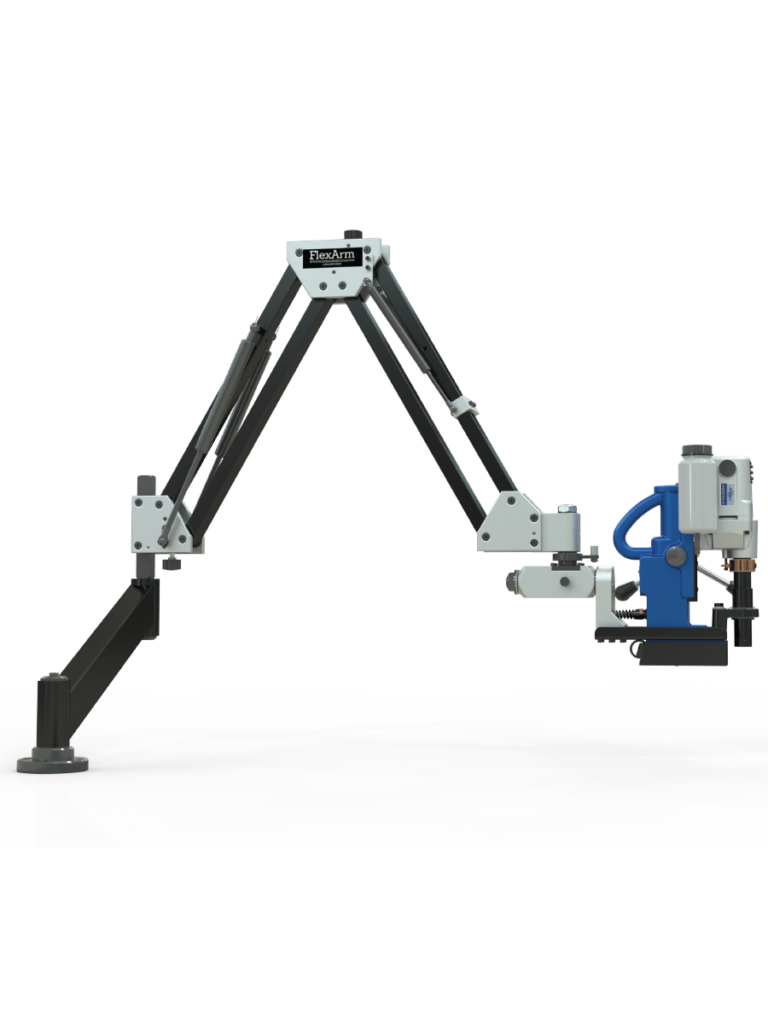
FlexArm includes tapping arms, assembly arms, and ergonomic tools designed to improve productivity, reduce worker fatigue, and provide custom solutions for a variety of applications.

If you like our Flex Swag. We now have a live store where you can purchase our FlexSwag
Tube lasers are powerful and efficient machines known for precise cutting of tubes and various long materials. However, their high price and specialization often make them impractical for shops with lower volumes or diverse processing needs. If you’re exploring affordable alternatives to tube lasers, the FlexCNC (long-bed vertical machining center) stands out as a versatile, cost-effective solution.
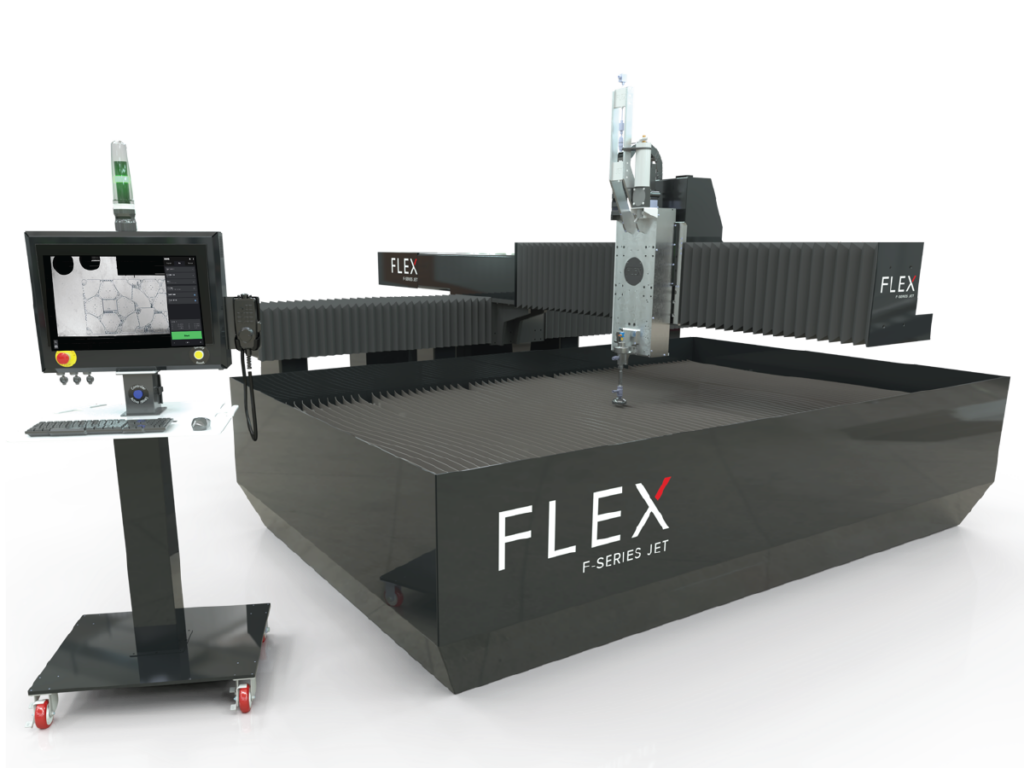
Jason covers the 2D basics of IGEMS software, walking you through the essential steps to program and export a CNC file for your FlexJet Waterjet.
Beam drill lines accurately drill holes in a variety of steel profiles at different lengths with CNC controlled programming.
FlexArm includes tapping arms, assembly arms, and ergonomic tools designed to improve productivity, reduce worker fatigue, and provide custom solutions for a variety of applications.
If you like our Flex Swag. We now have a live store where you can purchase our FlexSwag
Watch the video of this application at the bottom of this page.
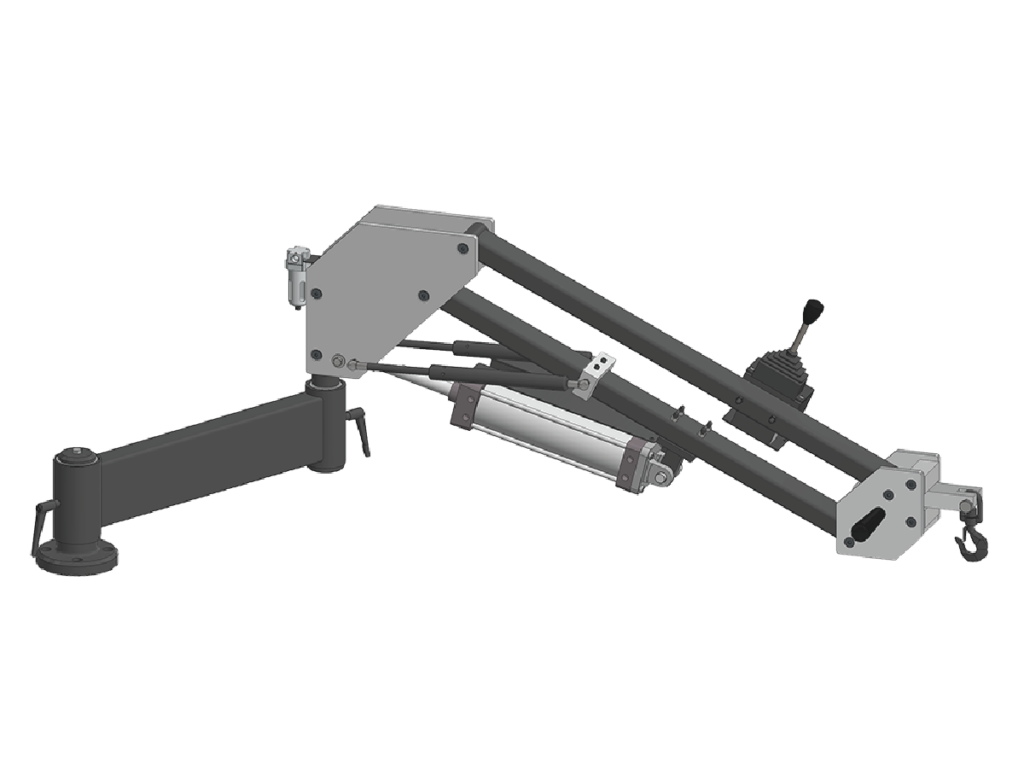
We had a customer looking for a torque reaction solution that could counterbalance a 25-pound pistol grip nutrunner, so we took the manufacturer’s reaction plate (Atlas Copco) and welded it to the front of the custom mount on the G-30 FlexArm.
The mount allows the operator to rotate the tool inside of its housing inside of the reaction plate, and align it any way they need. Once the tool is engaged, the reaction plate itself will eat up the 500 Newton Metres of torque.
The G-30 FlexArm has a reach up to 73 inches, allowing the operator to easily maneuver the tool and reach their desired area.
Contact us today or give us a call at 1-800-837-2503, if you’re interested.
